
LC: 489. Robot Room Cleaner
https://leetcode.com/problems/robot-room-cleaner/
interface Robot {
// returns true if next cell is open and robot moves into the cell.
// returns false if next cell is obstacle and robot stays on the current cell.
boolean move();
// Robot will stay on the same cell after calling turnLeft/turnRight.
// Each turn will be 90 degrees.
void turnLeft();
void turnRight();
// Clean the current cell.
void clean();
}Example 1: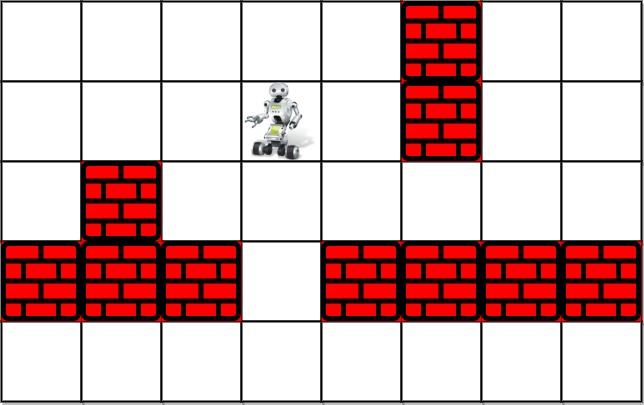

Last updated